verl场景下Snapshot数据采集和分析案例¶
问题背景¶
verl训练任务在PPO/RLHF等场景中,显存压力通常集中在rollout生成、actor更新、reference logprob计算、critic更新、reward model推理、checkpoint保存等阶段。为了定位峰值显存来源、观察显存是否随step持续增长、对比不同rank之间的显存分配差异,可以使用verl内置的torch_memory profiler采集PyTorch memory snapshot。
本文介绍verl场景下snapshot数据的采集方法,并给出基于MindStudio Insight的分析案例。
定位思路¶
- 优先使用最小化采集参数验证snapshot链路可用。
- 单卡场景采集rank 0,并控制采集步数,降低运行开销。
- 多卡场景优先采集代表性rank;只有需要观察所有rank差异时,才开启all-rank采集。
- 采集完成后检查输出目录,确认snapshot文件生成且非空。
- 后续使用MindStudio Insight分析工具进行问题分析。
Snapshot数据采集¶
采集参数说明¶
verl中开启memory snapshot采集的核心参数如下:
| 参数 | 说明 |
|---|---|
global_profiler.tool |
选择verl的PyTorch显存采集工具。 |
global_profiler.save_path |
snapshot文件输出目录。 |
actor_rollout_ref.actor.profiler.enable |
开启actor侧profiler集成。 |
actor_rollout_ref.actor.profiler.ranks |
指定采集的rank数组,适合单rank或少量rank采集。 |
actor_rollout_ref.actor.profiler.all_ranks |
采集所有rank,文件量和运行开销较大。 |
trainer.device |
指定训练任务使用的设备类型,例如cuda或npu。 |
global_profiler.steps |
控制采集的step范围。每次采集完成后会删除已有的memory history历史记录,避免不同采集窗口的数据相互混入。 |
global_profiler.global_tool_config.torch_memory.trace_alloc_max_entries |
保留的显存分配记录数量。值越大,snapshot越完整,但额外开销越高。 |
global_profiler.global_tool_config.torch_memory.stack_depth |
记录的调用栈深度。值越大,越有利于归因,但额外开销越高。 |
单卡采集命令¶
单卡任务只需要采集rank 0。以下命令以verl.trainer.main_ppo为入口,用户可将其中的数据集、模型和训练参数替换为实际任务配置。
python3 -m verl.trainer.main_ppo \
algorithm.adv_estimator=grpo \
data.train_files=/home/chenyan/verl_data/train.parquet \
data.val_files=/home/chenyan/verl_data/test.parquet \
data.train_batch_size=16 \
data.max_prompt_length=512 \
data.max_response_length=128 \
data.filter_overlong_prompts=True \
data.truncation=error \
actor_rollout_ref.model.path=/data/models/Qwen/Qwen2.5-7B-Instruct \
actor_rollout_ref.actor.ppo_mini_batch_size=8 \
actor_rollout_ref.actor.ppo_micro_batch_size_per_gpu=2 \
actor_rollout_ref.rollout.log_prob_micro_batch_size_per_gpu=4 \
actor_rollout_ref.rollout.tensor_model_parallel_size=1 \
actor_rollout_ref.rollout.name=vllm \
actor_rollout_ref.rollout.gpu_memory_utilization=0.2 \
actor_rollout_ref.rollout.n=4 \
actor_rollout_ref.ref.log_prob_micro_batch_size_per_gpu=4 \
trainer.n_gpus_per_node=1 \
trainer.nnodes=1 \
trainer.total_epochs=1 \
trainer.default_local_dir=/home/chenyan/verl_outputs \
trainer.device=npu \
global_profiler.tool=torch_memory \
actor_rollout_ref.actor.profiler.ranks='[0]' \
actor_rollout_ref.actor.profiler.enable=True \
global_profiler.steps=[1,2,3,4,5,6,7,8,9,10] \
global_profiler.save_path=/home/chenyan/verl_outputs/mem_snapshots_single \
global_profiler.global_tool_config.torch_memory.trace_alloc_max_entries=100000 \
global_profiler.global_tool_config.torch_memory.stack_depth=32
多卡指定rank采集命令¶
多卡任务建议先采集少量代表性rank,例如rank 0和rank 1,用于对比actor执行过程中的显存分配差异。以下命令以单机4卡为例。
python3 -m verl.trainer.main_ppo \
algorithm.adv_estimator=grpo \
data.train_files=/home/chenyan/verl_data/train.parquet \
data.val_files=/home/chenyan/verl_data/test.parquet \
data.train_batch_size=16 \
data.max_prompt_length=512 \
data.max_response_length=128 \
data.filter_overlong_prompts=True \
data.truncation=error \
actor_rollout_ref.model.path=/data/models/Qwen/Qwen2.5-7B-Instruct \
actor_rollout_ref.actor.ppo_mini_batch_size=8 \
actor_rollout_ref.actor.ppo_micro_batch_size_per_gpu=2 \
actor_rollout_ref.rollout.log_prob_micro_batch_size_per_gpu=4 \
actor_rollout_ref.rollout.tensor_model_parallel_size=4 \
actor_rollout_ref.rollout.name=vllm \
actor_rollout_ref.rollout.gpu_memory_utilization=0.2 \
actor_rollout_ref.rollout.n=4 \
actor_rollout_ref.ref.log_prob_micro_batch_size_per_gpu=4 \
trainer.n_gpus_per_node=4 \
trainer.nnodes=1 \
trainer.total_epochs=1 \
trainer.default_local_dir=/home/chenyan/verl_outputs \
trainer.device=npu \
global_profiler.tool=torch_memory \
actor_rollout_ref.actor.profiler.ranks='[0,1]' \
actor_rollout_ref.actor.profiler.enable=True \
global_profiler.steps=[1,2,3,4,5,6,7,8,9,10] \
global_profiler.save_path=/home/chenyan/verl_outputs/mem_snapshots_selected_ranks \
global_profiler.global_tool_config.torch_memory.trace_alloc_max_entries=100000 \
global_profiler.global_tool_config.torch_memory.stack_depth=32
多卡全rank采集命令¶
如果需要比较所有rank的峰值显存、分配栈或step间增长差异,可以开启全rank采集。该模式会生成更多snapshot文件,并带来更高运行开销,建议只在较短训练窗口内使用。
python3 -m verl.trainer.main_ppo \
algorithm.adv_estimator=grpo \
data.train_files=/home/chenyan/verl_data/train.parquet \
data.val_files=/home/chenyan/verl_data/test.parquet \
data.train_batch_size=16 \
data.max_prompt_length=512 \
data.max_response_length=128 \
data.filter_overlong_prompts=True \
data.truncation=error \
actor_rollout_ref.model.path=/data/models/Qwen/Qwen2.5-7B-Instruct \
actor_rollout_ref.actor.ppo_mini_batch_size=8 \
actor_rollout_ref.actor.ppo_micro_batch_size_per_gpu=2 \
actor_rollout_ref.rollout.log_prob_micro_batch_size_per_gpu=4 \
actor_rollout_ref.rollout.tensor_model_parallel_size=4 \
actor_rollout_ref.rollout.name=vllm \
actor_rollout_ref.rollout.gpu_memory_utilization=0.2 \
actor_rollout_ref.rollout.n=4 \
actor_rollout_ref.ref.log_prob_micro_batch_size_per_gpu=4 \
trainer.n_gpus_per_node=4 \
trainer.nnodes=1 \
trainer.total_epochs=1 \
trainer.default_local_dir=/home/chenyan/verl_outputs \
trainer.device=npu \
global_profiler.tool=torch_memory \
actor_rollout_ref.actor.profiler.all_ranks=True \
actor_rollout_ref.actor.profiler.enable=True \
global_profiler.steps=[1,2,3,4,5,6,7,8,9,10] \
global_profiler.save_path=/home/chenyan/verl_outputs/mem_snapshots_all_ranks \
global_profiler.global_tool_config.torch_memory.trace_alloc_max_entries=100000 \
global_profiler.global_tool_config.torch_memory.stack_depth=32
采集结果整理¶
采集完成后,verl会在global_profiler.save_path指定的输出目录下按step创建子目录。每个step目录内部直接保存所有已配置采集rank在该step采集到的snapshot文件,文件名格式为torch_memory_rank{卡号}_pid{进程号}.pickle:
mem_snapshots_selected_ranks/
├── step1/
│ ├── torch_memory_rank0_pid12345.pickle
│ └── torch_memory_rank1_pid12346.pickle
├── step2/
│ ├── torch_memory_rank0_pid12345.pickle
│ └── torch_memory_rank1_pid12346.pickle
└── step3/
├── torch_memory_rank0_pid12345.pickle
└── torch_memory_rank1_pid12346.pickle
对比不同rank时,应在同一个step目录下比较各rank的数据。对比不同实验时,需要记录模型路径、batch size、prompt/response长度、rollout并行度、FSDP/TP/PP配置和采集参数。
Snapshot分析案例¶
软件安装¶
下载MindStudio Insight工具并安装,请参见MindStudio Insight安装指南。
导入数据¶
- 打开MindStudio Insight。
- 导入snapshot数据文件。
- 打开“内存详情”中的“PyTorch Snapshot 数据内存详情(内存快照)”界面。
内存块生命周期图分析¶
在“内存块生命周期图”中,优先观察Operator Allocated曲线在step 3采集窗口内的变化趋势:
- 如果图持续上升且没有回落,说明采集窗口内可能存在Tensor持续保留或跨阶段未释放的情况。
- 如果图呈现周期性上升和回落,说明显存主要随forward、backward、optimizer step等阶段正常申请和释放。
- 如果图在某一时间点出现大幅跃升,需要点击对应位置的内存块或事件,进一步在“内存池状态图”和“内存详情表”中查看对应调用栈。

该样例中,图呈现周期性上升和回落,说明内存申请和释放正常进行。
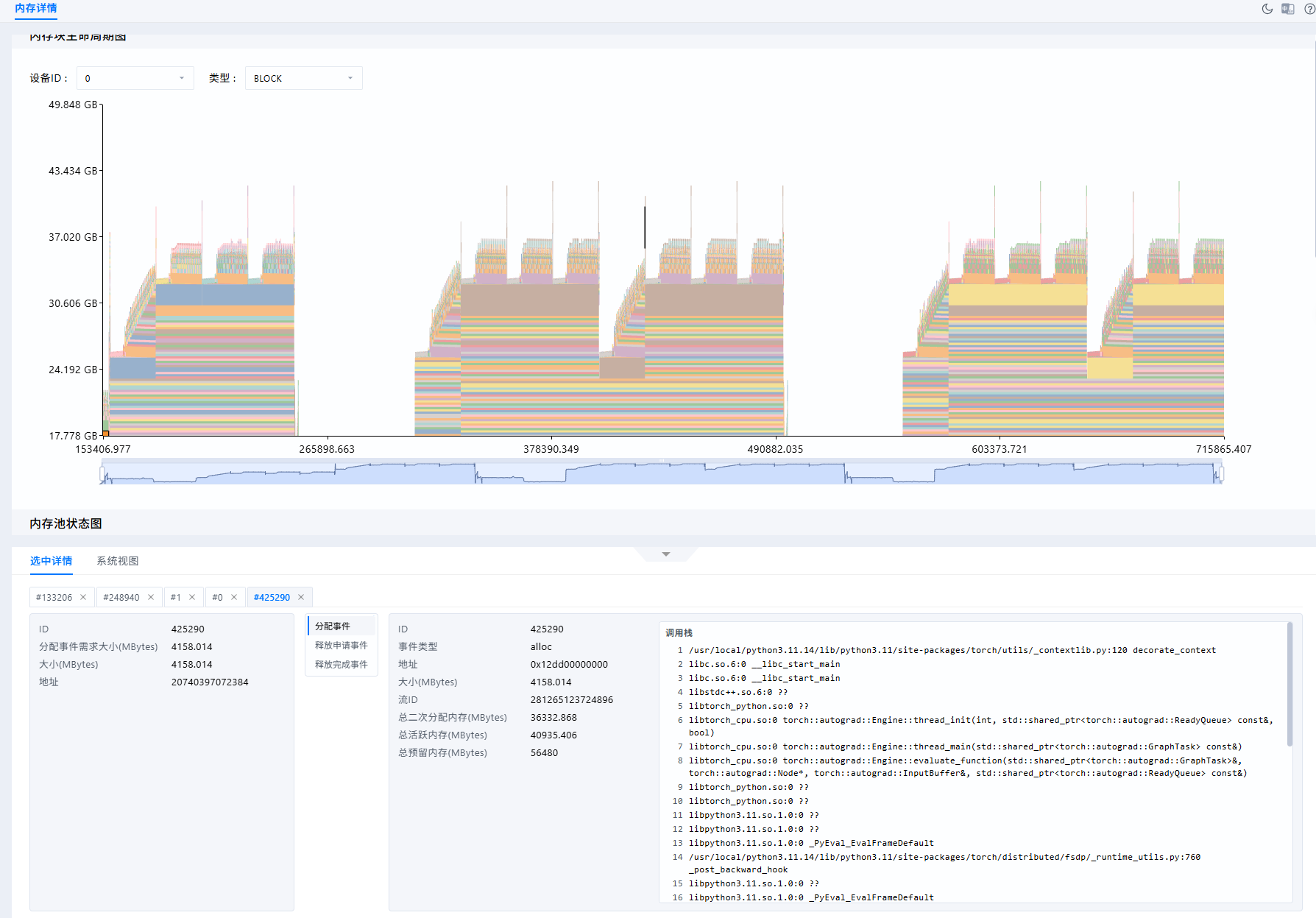
但是存在一些短促的大内存申请,如果有内存瓶颈问题,可以点击选中这些块,在详情和内存池状态图中具体分析。
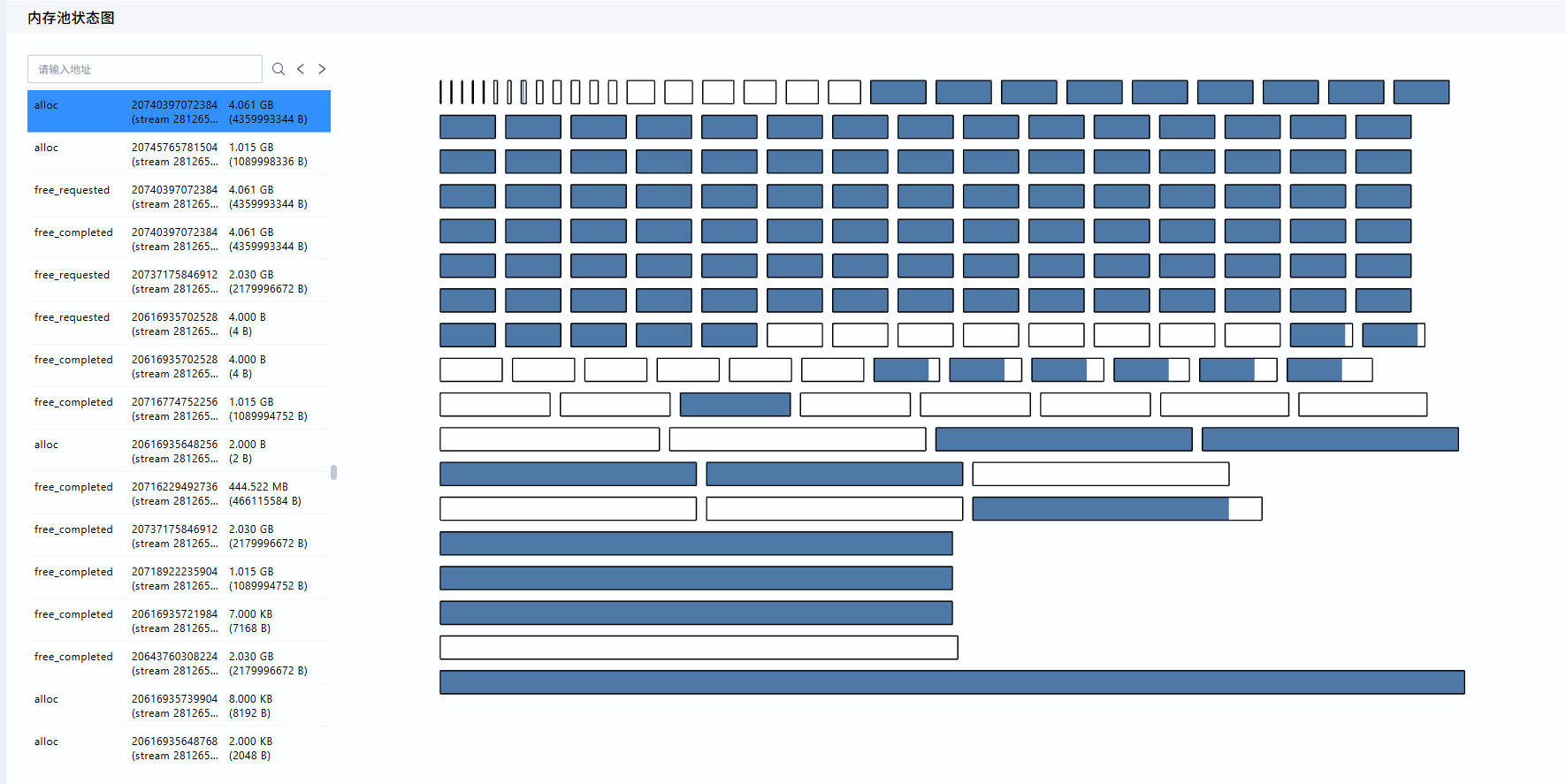
内存池状态图分析¶
在“内存池状态图”中,选择生命周期图中的块或者左侧的事件列表后,可以查看内存池中各Segment的拆分状态。内存池状态可按如下思路观察:
- 查看每个Segment中
active_allocated和inactive块的比例,判断预留内存中有多少仍被Tensor占用。 - 查看大块
inactive是否被切分为多个小块,判断是否存在明显碎片化。 - 如果存在OOM事件,应定位OOM发生时的内存池状态,判断是否是Reserved较高但可用连续块不足导致的分配失败。
当前案例数据内存分配和释放正常,不做具体分析。
内存块视图分析¶
在“内存块视图”中,可以通过数据表格的表头进行联合排序,从而更加精确的定位问题出现的内存块
当前样例中,我通过对分配事件需求大小进行排序,可以更快的找到大内存块的分配事件。
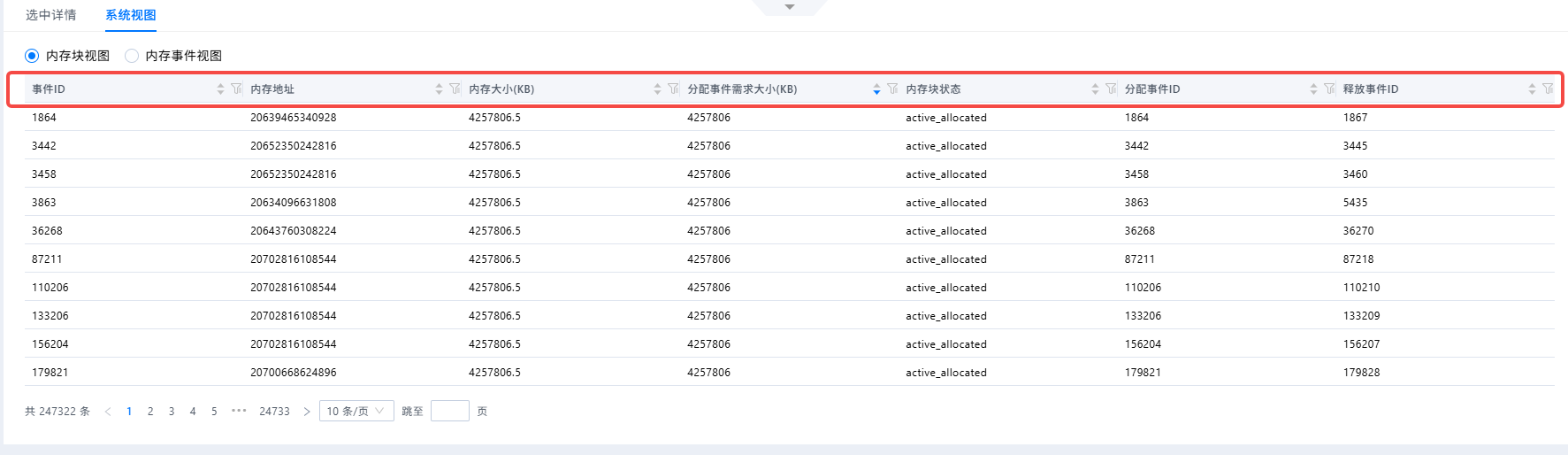
并且可以复制此次事件的内存地址,在内存池状态图中的事件列表中进行搜索,找到这次事件发生时的内存状态进行分析
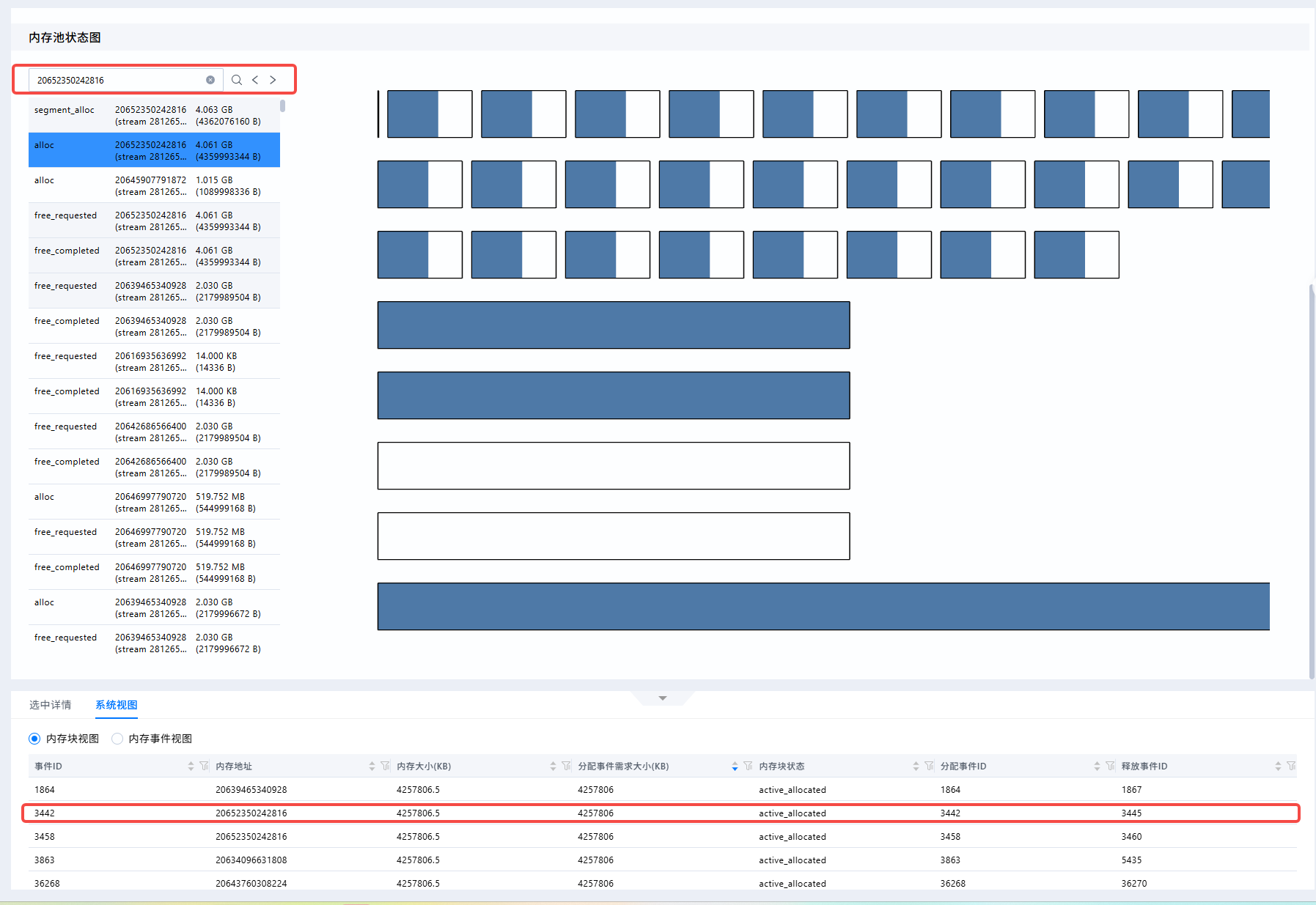
如果需要进一步确认大块内存对应的业务阶段,可在“内存块生命周期图”中找到对应内存块,并结合选中详情中的调用栈继续分析。
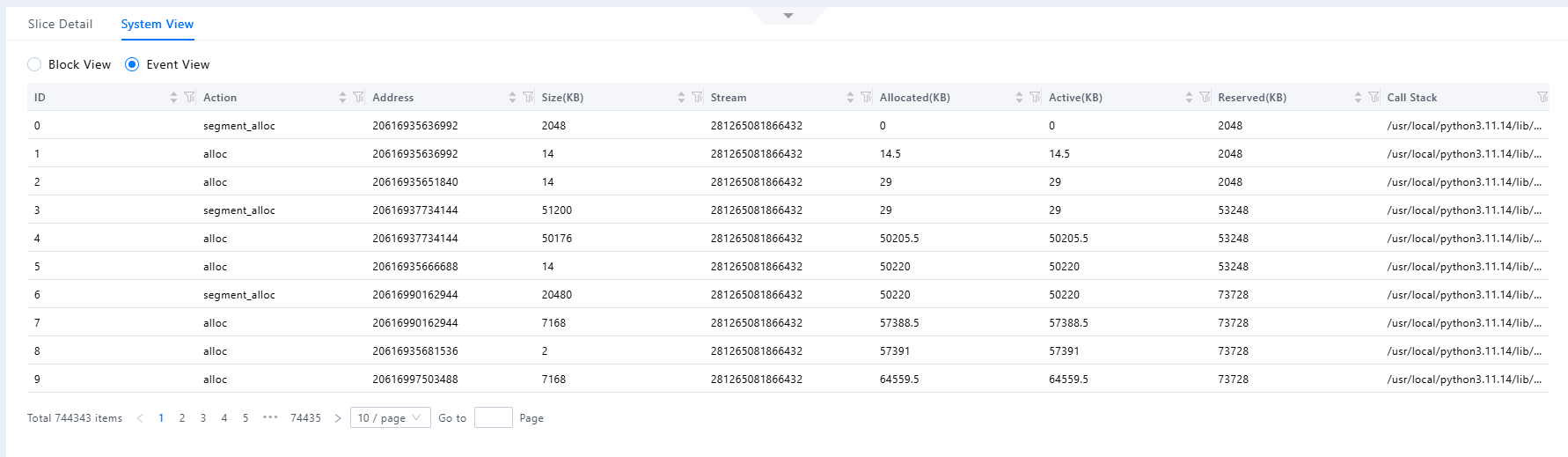
内存事件视图分析¶
在“内存事件视图”中,重点查看Action、Size(KBytes)、Allocated(KBytes)、Active(KBytes)、Reserved(KBytes)和Call Stack字段。这里也可以像“内存块视图”进行表格的联合筛选,提高定位问题的效率。
案例结论¶
基于该snapshot数据,可以得到如下结论:
- 当前snapshot未记录到OOM事件。
- 在内存生命周期中,图呈现周期性上升和回落,说明内存申请和释放正常进行。
- 若要继续定位显存峰值来源,可在MindStudio Insight中点击最大内存块或峰值时间点,沿调用栈继续确认其出现的阶段和原因。